What Is ECU Mapping and Why WinOLS Is Used
ECU mapping is the process of analyzing and modifying the calibration data inside an Engine Control Unit (ECU). This data determines how an engine behaves under different operating conditions, such as load, engine speed, and temperature. In professional tuning environments, ECU mapping is not about applying preset values, but about understanding engine strategies and adjusting them in a controlled and verifiable way. This is where WinOLS is commonly used. This article explains what ECU mapping really involves and why WinOLS is the preferred tool for professional ECU tuning workflows.
In this article
What is ECU mapping?
An ECU contains thousands of data points that control engine behavior. ECU mapping refers to identifying and modifying specific calibration maps that influence parameters such as:
-
Torque limitation
-
Fuel quantity and injection timing
-
Boost pressure control
-
Rail or fuel pressure targets
-
Smoke or lambda control
Each map defines how the engine responds under certain conditions. ECU mapping is therefore about strategy and structure, not about isolated values.
ECU mapping is not “one-click tuning”
A common misconception is that ECU mapping is a simple value adjustment or automated process.
In reality, professional ECU mapping requires:
-
Correct map identification
-
Understanding of axis scaling and operating ranges
-
Knowledge of ECU logic and dependencies
-
Validation of changes across the full load and RPM range
Without this context, changes may appear correct but lead to unreliable or unsafe engine behavior.
Why professionas use WinOLS for tuning
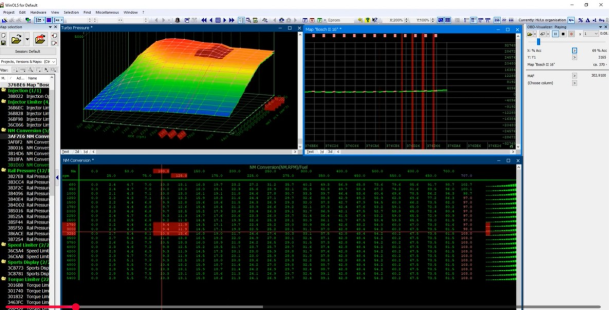
WinOLS is widely used because it allows tuners to see, understand, and control ECU data at a structural level.
Key reasons WinOLS is used for ECU mapping:
-
Direct access to raw ECU data
-
Identification and visualization of maps and axes
-
Support for DAMOS and A2L description files
-
Manual control over map editing and structure
-
Checksum handling depending on ECU type
WinOLS does not make tuning decisions for you. It provides the environment to make informed decisions based on data structure and calibration logic.
The role of WinOLS in a ECU mapping workflow
In a typical professional workflow, WinOLS is used to:
-
Analyze the original ECU file
-
Identify relevant maps and axes
-
Validate scaling and operating ranges
-
Apply calibrated changes
-
Correct checksums where required
-
Validate the modified file before flashing
This structured approach reduces risk and improves consistency across projects.
When ECU mapping with WinOLS makes sense (and when it doesn’t)
ECU mapping with WinOLS is suitable when you:
-
Work with complex ECUs and strategies
-
Need full control over calibration data
-
Modify or validate tuning files yourself
-
Combine self-tuning with file services
WinOLS is less suitable when you:
-
Are new to ECU tuning without technical background
-
Only use ready-made tuning files
-
Expect automated or guided tuning solutions
In those cases, our reseller database access or access to our custom remapped tuning files are often more efficient.
ECU mapping requires verification, not assumptions
Successful ECU mapping depends on:
-
Verified map usage
-
Correct axis interpretation
-
Proper checksum handling
-
Validation before flashing
WinOLS supports this process, but responsibility always remains with the tuner.